最优化算法速通 - 线性规划
06 December 2022 |
duanyll | Tags:
最优化
标准型
\[\begin{array}{r l}{\operatorname*{minimize} }&{ {}c^{\textsf{T} }x}\\ {\operatorname{subject\;to} }&{ {}A x\geq b}\\&x\geq0\end{array}\]- 约束集:$\mathrm{W}!=!\left{x!\in!R^{n}!:!A!x!=!b,x!\geq!0\right}$是凸多面体, 多胞形
- 凹函数在凸集上的极值点一定是集合的边界点, 线性规划的极值点一定是多胞形的顶点
- 解的存在性
- 可行域为空集, 无最优解
- 可行域为有界闭集, 最优解不唯一
- 可行域为无界集, 不确定有无最优解
线性规划标准型:
\[\begin{array}{r l}{\operatorname*{minimize} }&{ {}c^{\textsf{T} }x}\\ {\operatorname{subject\;to} }&{Ax=b}\\&x\geq0\end{array}\]其中 $A\in\mathbb{R}^{m\times n},m<n,\operatorname{rank}A=m,b\geq0$
化为标准型:
- 最大化转化为最小化相反数
- 不等式约束引入松弛变量化为等式约束 (确保不等式只需大于等于0, 同时反转不等号方向)
- $x_1\leq7\rArr x_1+x_2=7,x_2\geq0$
- $a_{1}x_{1}+a_{2}x_{2}\leq b,x_{1},x_{2}\geqslant0\rArr a_{1}x_{1}+a_{2}x_{2}+x_{3}=b,x_{1},x_{2},x_{3}\leq0$
- 决策变量属于实数 $x_i\in\mathbb{R}^n$ 时, 对分量进行非负拆分
- $b_i<0$ 则两侧同乘 -1
线性规划的解
\[\begin{array}{r l}{\operatorname*{minimize} }&{ {}c^{\textsf{T} }x}\\ {\operatorname{subject\;to} }&{Ax=b}\\&x\geq0\end{array}\]其中 $A\in\mathbb{R}^{m\times n},m<n,\operatorname{rank}A=m,b\geq0$
从 $A$ 中任选 $m$ 个线性无关的列向量记作 $B\in\R^{m\times m}$, 则 $A=[B,D],D\in\R^{m\times(n-m)}$, 则
- 在 $B$ 下的基本解: $x=\left[x_{B}^{\top},0^{\top}\right]^{\top}, x_{B}=B^{-1}D$ 是 $Ax=b$ 的一个解
- 基变量: $x_B$ 中的元素
- 基本列向量: $B$ 中的列向量
- 退化的基本解: $x_B$ 中有变量是 0
- 可行解: 满足约束条件 $Ax=b,\;x>0$
- 基本可行解: $x_B\geq0$
- 可以通过暴力枚举 $B$ (要保证 $B$ 可逆)的方法求所有基本可行解
- 最多有 $C_n^m$ 个基本解
- 退化的基本可行解
- 最优可行解: 满足约束条件且使得 $c^\top x$ 取得极小值
线性规划基本定理:
- 存在可行解 $\rArr$ 存在基本可行解
- 存在最优可行解 $\rArr$ 存在最优基本可行解
则可以通过搜索有限数量的基本可行解来求解线性规划问题. 但直接枚举复杂度很高, 需要更好的做法
解的性质:
- 基本可行解 $\lrArr$ 非零分量对应的列向量组线性无关 $\lrArr$ 在可行域的顶点处取得
- 最优解一定在可行域的顶点处取得
单纯形法
从某个基本可行解变换到另一个基本可行解, 直到找到最优基本可行解.
转轴元素
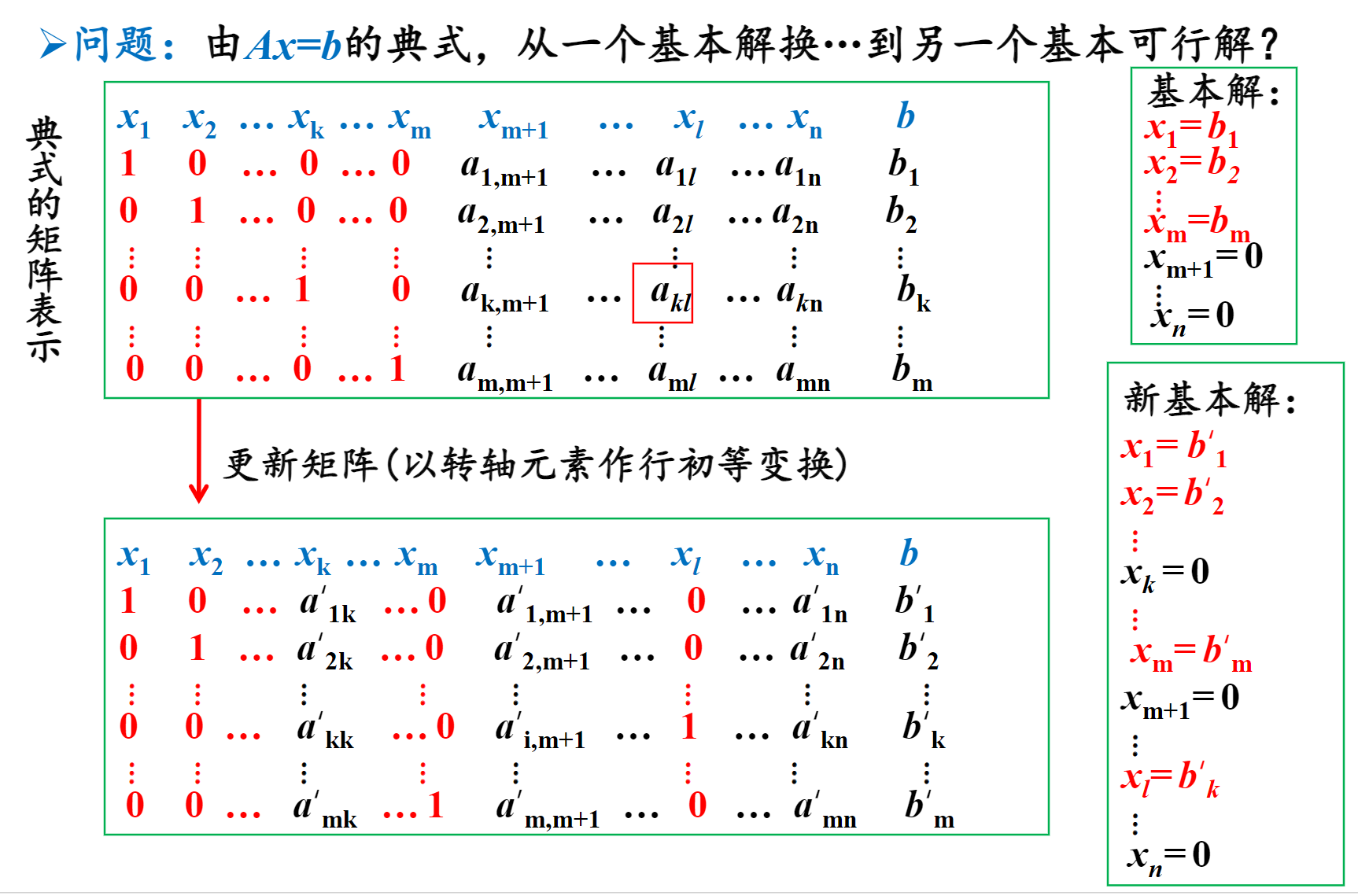
行的选择: 希望能保证变换后 $b’_k>0$, 保证基本解的可行性. 于是在第 $l$ 列中选择满足以下条件的元素:
\[{\frac{b_{k} }{a_{k l} } }=\operatorname*{min}_{i=1,\cdots,m}\left\{ {\frac{b_{i} }{a_{i l} } }|a_{i l}>0\right\}\]这样能使得 $b’_i$ 尽量大:
\[b_{i}^{\prime}=b_{i}-\frac{b_{k} }{a_{k l} }a_{i l},\;\;\;i=1,\cdots,m;\]判断解的最优性
设 $A$ 的前 $m$ 列 $B$ 是基向量, $A=[B,D]$, $x=[x_B,x_D]$, $c^\top=[c_B^\top,c_D^\top]$, 约束条件:
\[B x_{B}+Dx_{D}=b, x_B\geq0,x_D\geq0\]- 若 $x_D=0$, 则为基本可行解, $x=\left[\frac{x_{B} }{x_{D} }\right]=\left[\begin{array}{c}{ {B^{-1}b} }\ { {0} }\end{array}\right]$, 目标函数值: $z_{0}=c_{B}^{\top}B^{-1}b$
- 若 $x_D\neq0$, 则 $x_{B}=B^{-1}b-B^{-1}D x_{D}$. 定义 $r_{D}^{\top}=c_{D}^{\top}-c_{B}^{\top}B^{-1}D$, 则目标函数值 $z=z_{0}+r_{D}^{\top}x_{D}$
则 $r_D\geq0\lrArr$ 最优解. 若 $r_D$ 中存在负分量, 则将 $x_D$ 中相应的值从 0 变为正数, 目标函数值就能变小, 通过转轴运算更新一次矩阵
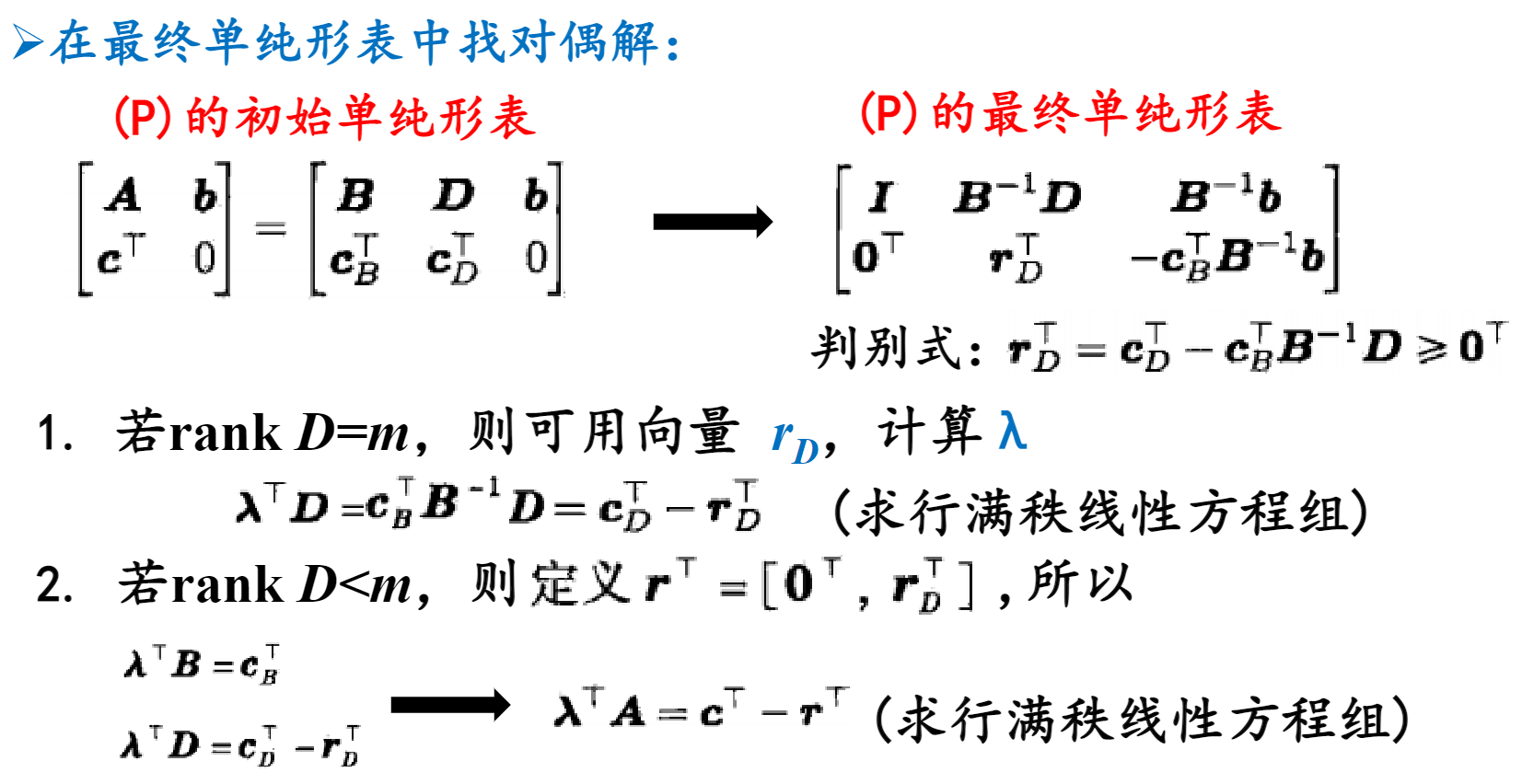
单纯形表的矩阵表示
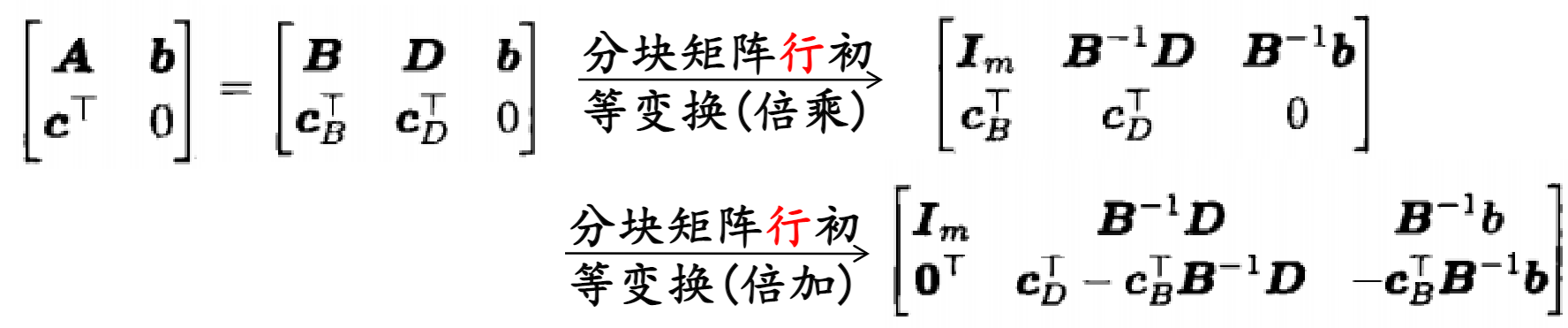
线性规划的基、基变量、基本可行解、判别式、函数值都在最后一个矩阵中.
将初始单纯形表转化为标准单纯形表, 需要做行初等变换使得基变量所在列的判别式值为 0, 然后进行单纯形表的操作:
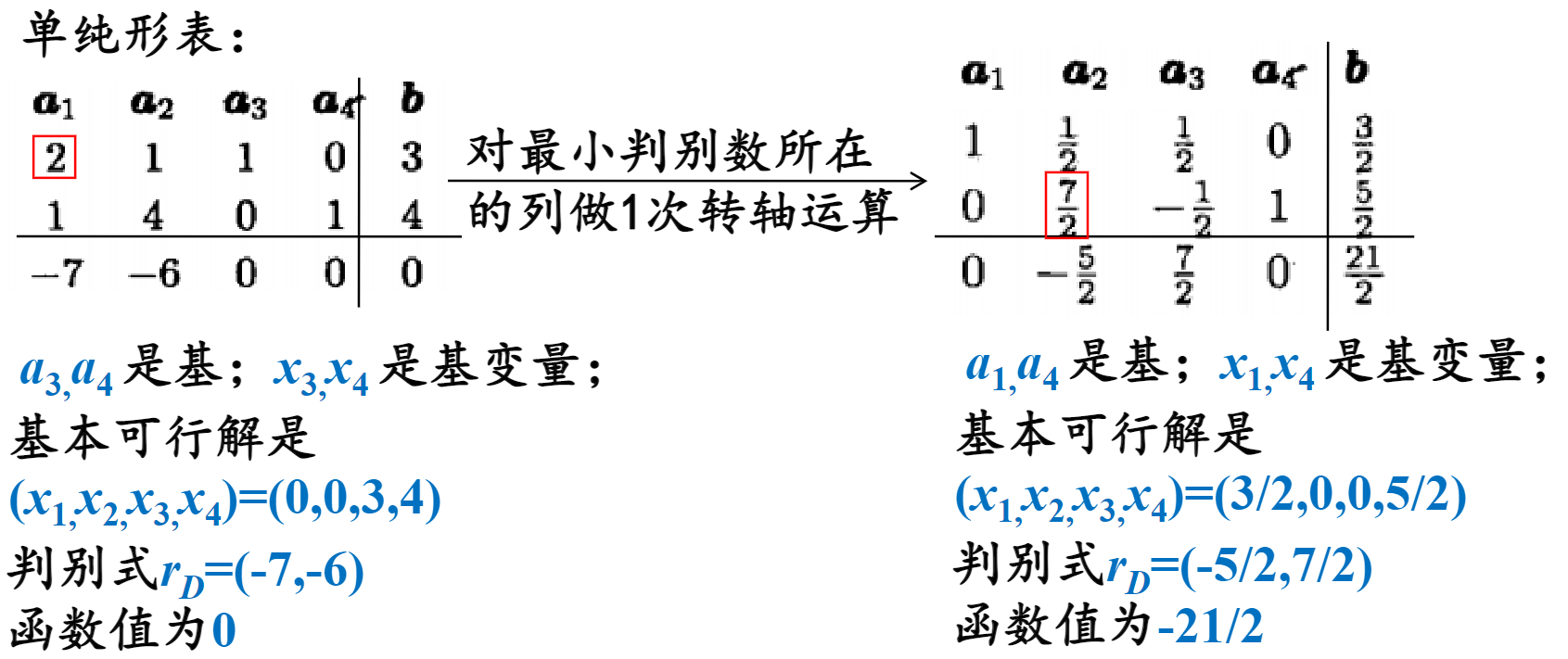
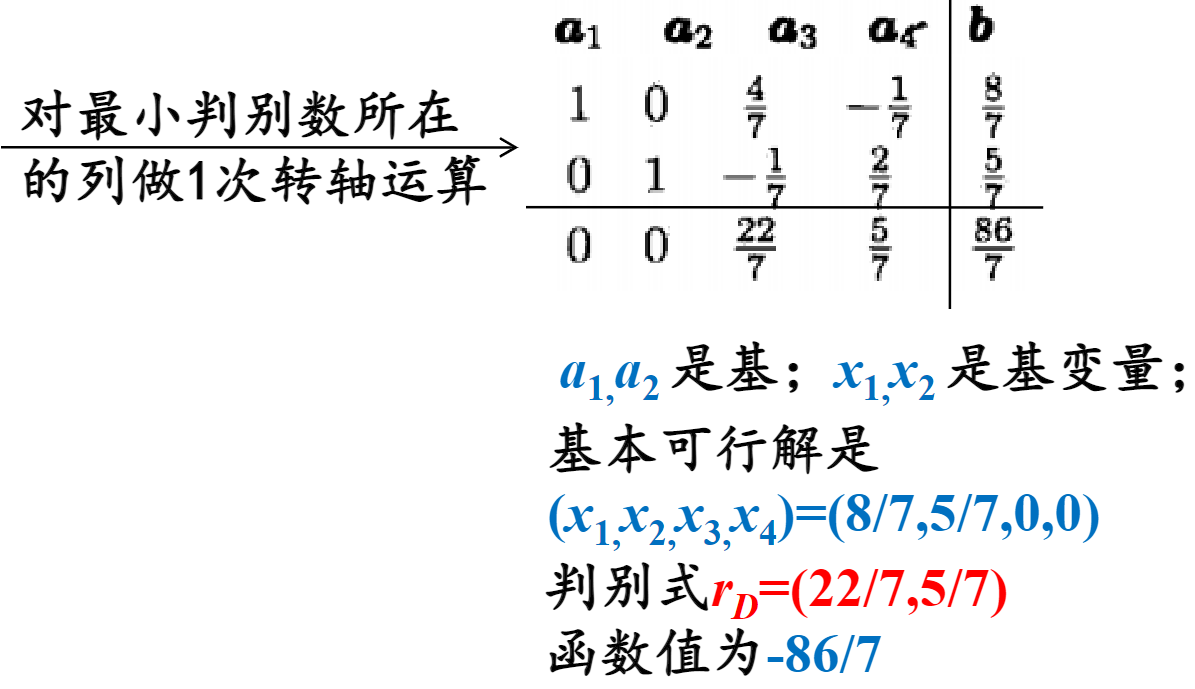
- 若上述矩阵中的判别式全部非负,则此时的基本解就是最优解,最优值的相反数在矩阵的右下角
- 若上述矩阵中的判别式有负元素,则取最小的负元素所在的列进基,做1次转轴运算, 同时通过行初等变换更新判别式的值
例子:
确定初始可行基
有些明显的初始可行基可以直接看出来, 有的不行, 穷举 $m$ 个列向量不现实, 需要更好的方法.
两阶段法
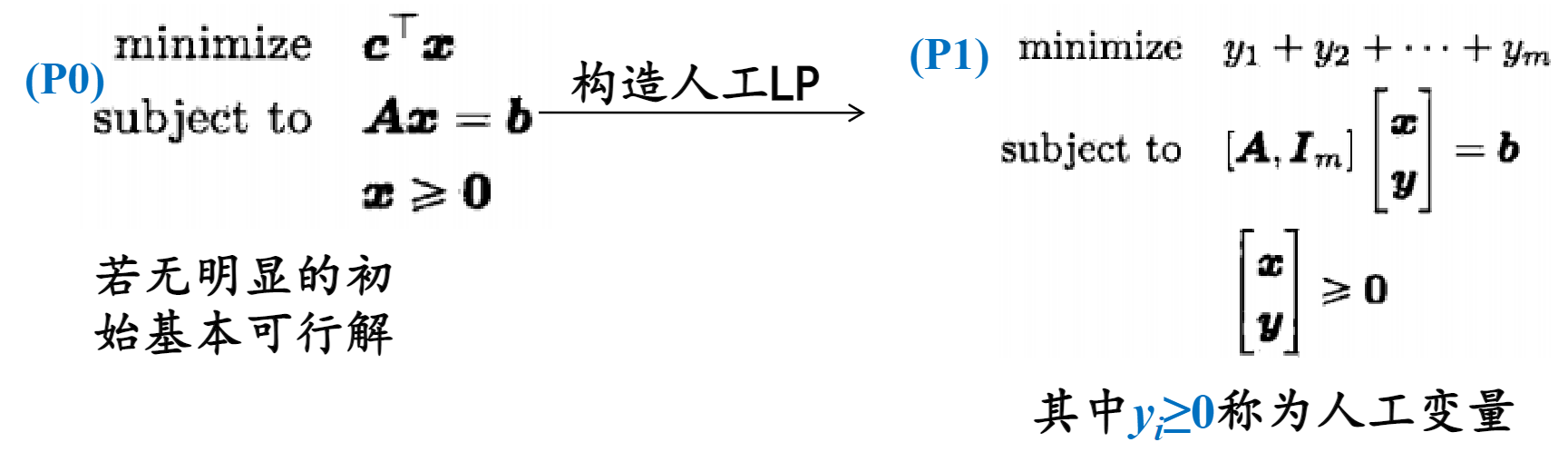
P0 有基本可行解 $\lrArr$ P1 有最优解且最有函数值为 0
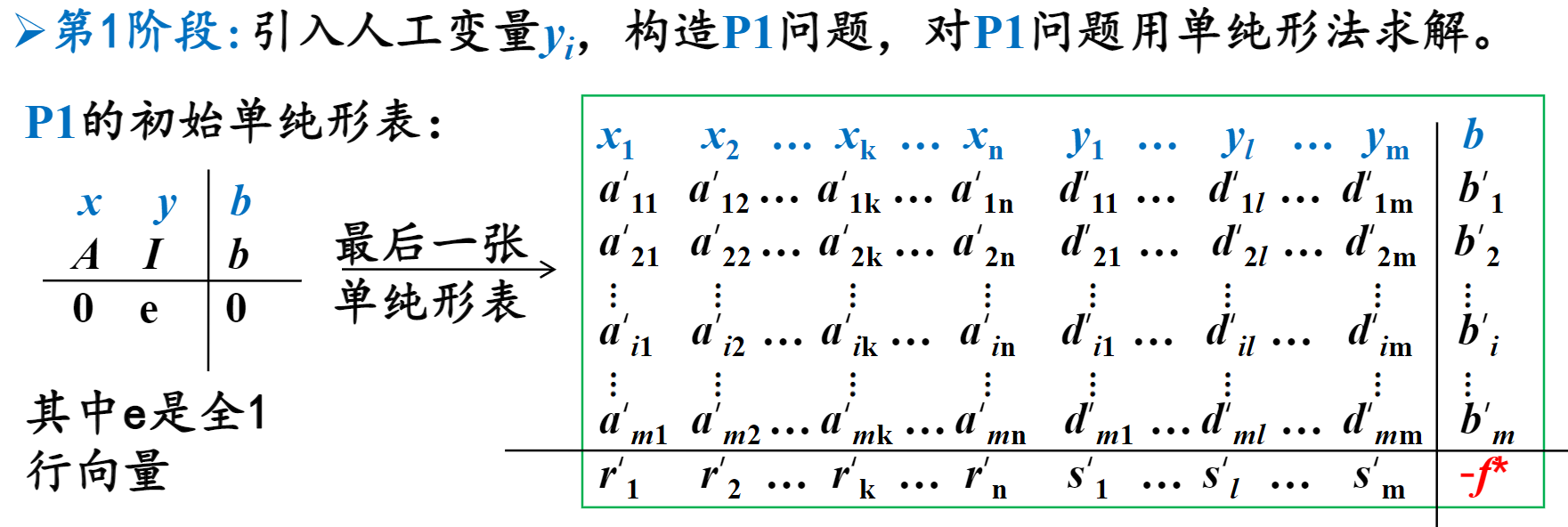
- (第一阶段) P1 初始时基变量全部位于人工变量中, 基变量的判别式均为 1
- 通过行初等变换化为标准单纯形表, 使得基变量的判别式为 0
- 做转轴变换直到求出最优解
- 若最优解不为 0 则无解
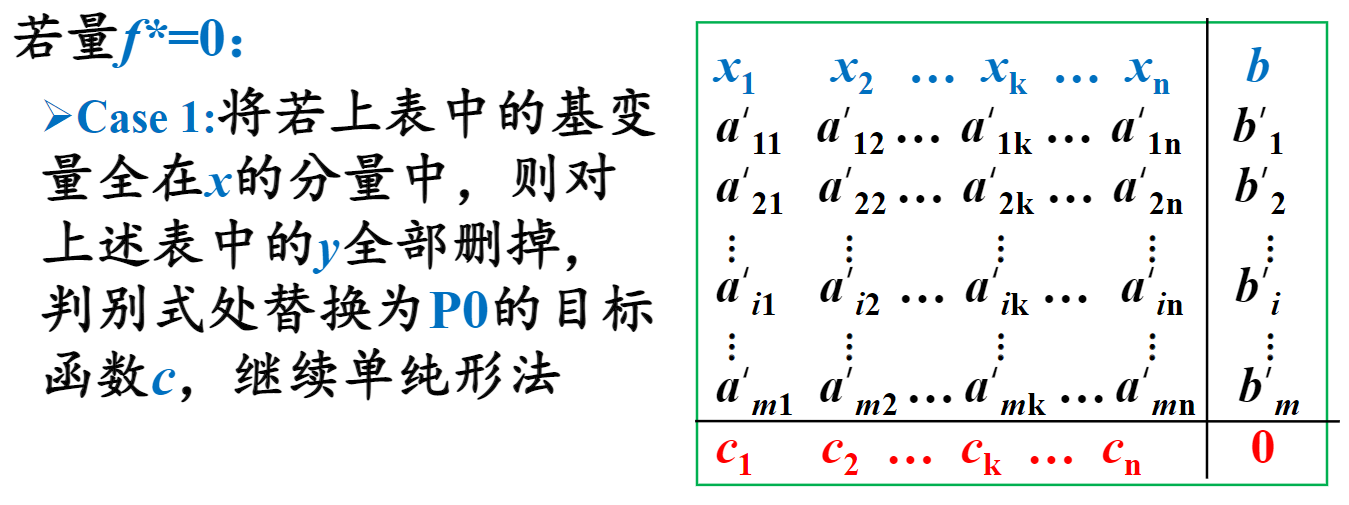
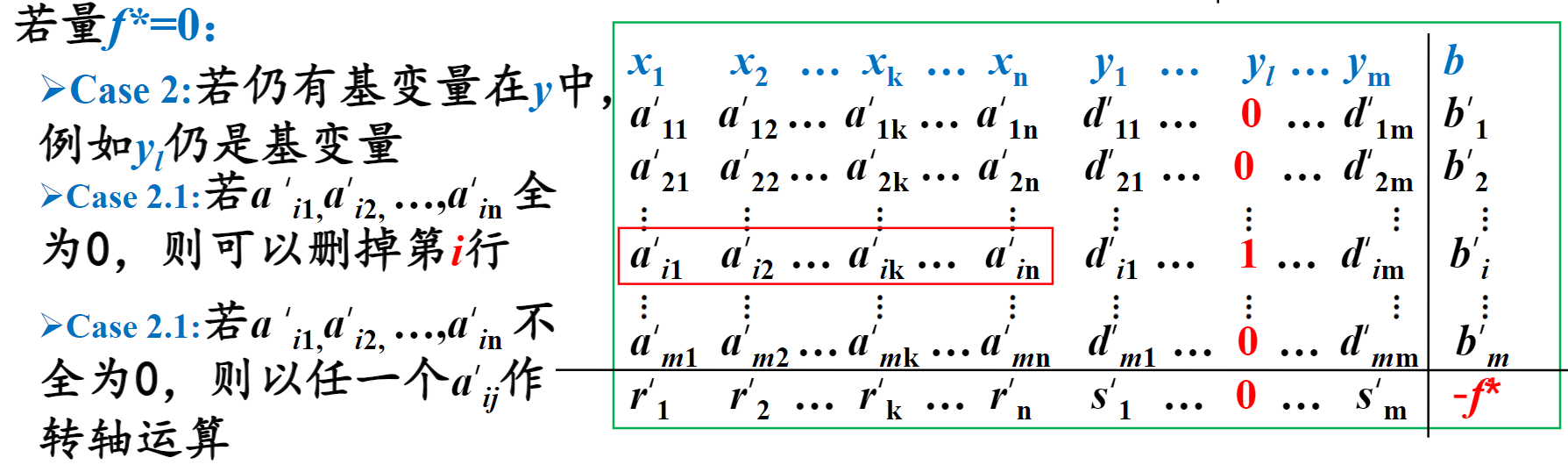
- 若有基变量在人工变量中
- 若这一行 $x_{i1}=\cdots=x_{in}=0$, 则直接删除行
- 否则任选一个非零 $x_{ij}$ 做转轴变换使得人工变量出基
- 删除人工变量的列
- (第二阶段) 根据最小判别数不断做转轴运算求最优解.
若 $f^*>0$, 则 P0 无解.
大 M 方法
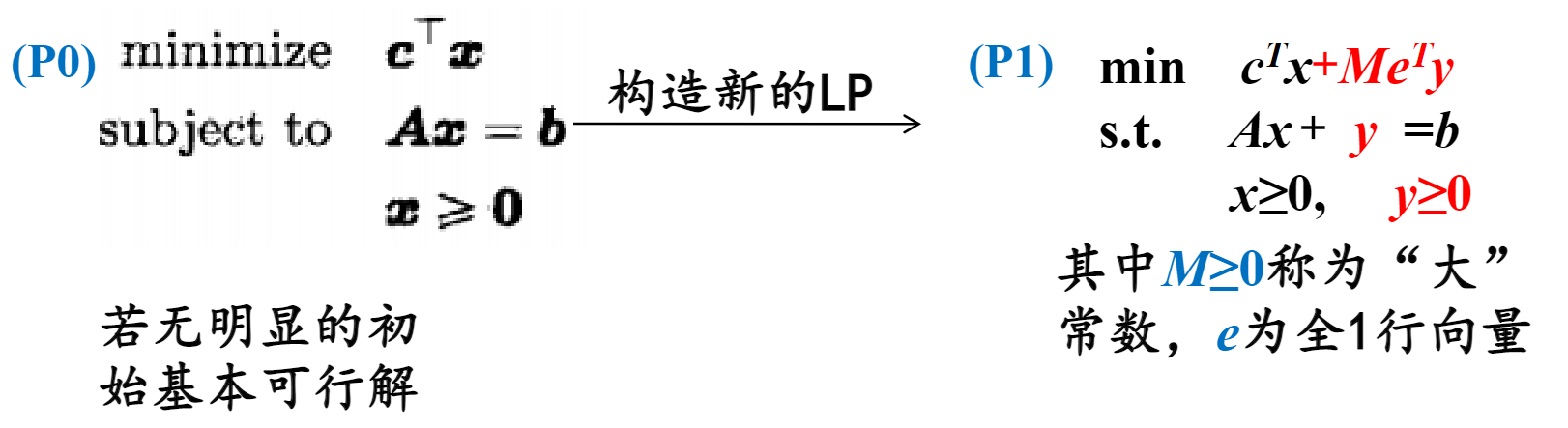

加入至多 $m$ 个人工变量 $y_i$ 使得能找出一组基, 求解含参 $M$ 线性规划问题, 使用判别数时认为 $M$ 时无穷大, 得到的解就是原问题的解.
对偶线性规划
原问题 (P):
\[\begin{array}{r l}{\operatorname*{minimize} }&{ {}c^{\textsf{T} }x}\\ {\operatorname{subject\;to} }&{Ax=b}\\&x\geq0\end{array}\]对偶问题 (D):
\[\begin{array}{r l}{\operatorname*{maximize} }&{ {}\lambda^{\textsf{T} }b}\\ {\operatorname{subject\;to} }&{\lambda^\top A\leq c}\end{array}\]- 弱对偶定理: $x$ 原问题可行解, $\lambda$ 对偶问题可行解, $c^\top x\geq\lambda^\top b$
- 若 $c^\top x_0=\lambda_0^\top b$, 则 $x_0$ 和 $\lambda_0$ 是各自问题的最优解
- 如果 (P) 问题有最优解,那么 (D) 问题也有最优解,并且它们的最优函数值相同
互补松弛定理: 可行解 $x$ 和 $\lambda$ 是最优解 $\lrArr$
- $(c^\top - \lambda^\top A)x=0$
- $\lambda^\top(Ax-b)=0$